
In questa relazione ho simulato un quadricottero controllato in posizione utilizzando e modificando una interfaccia Matlab esistente. Ho ipotizzato di avere a disposizione dei sensori, GPS, giroscopi, accelerometri e magnetometri triassiali aggiungendo rumore di misura e ristimando lo stato del modello.
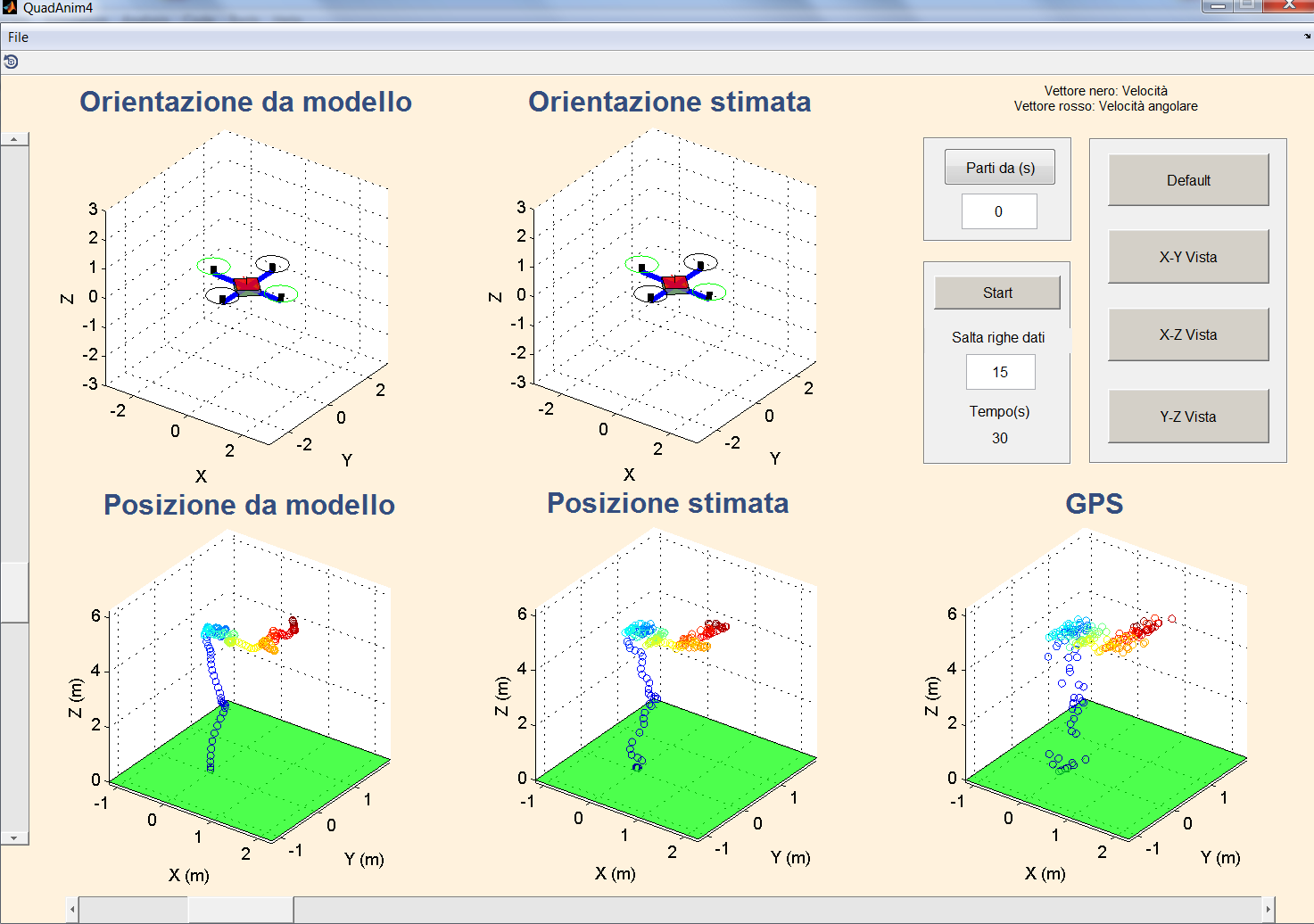
Un interessante lavoro anche in previsione di una realizzazione, già ampliamente elaborato che consente di caricare il proprio modello di quadricottero.
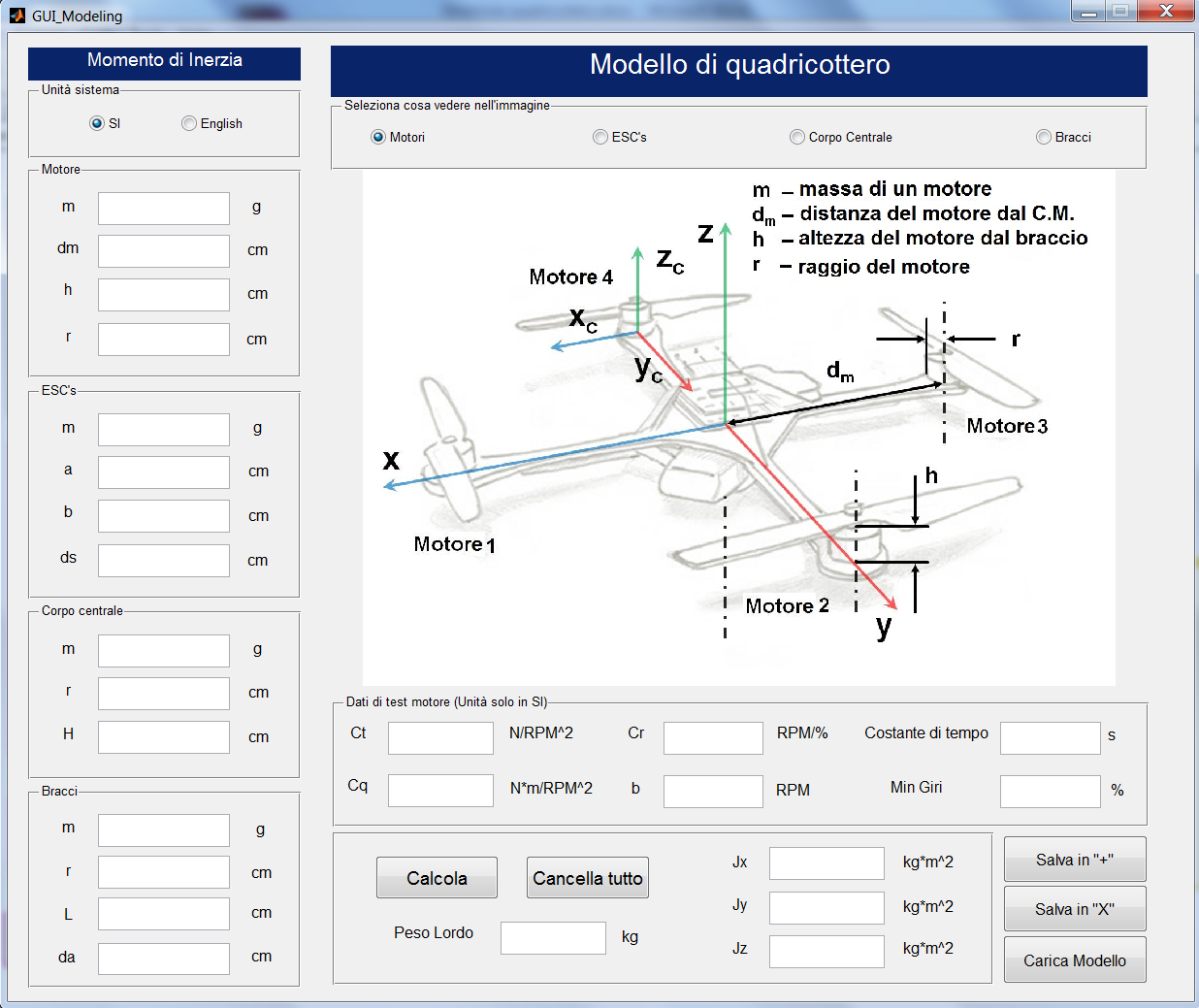
E simulare il comportamento con disturbi e di ricavare i guadagni da inserire nei PID.
Qui potete scaricare todos!