Ci ho provato anche se non tutte le ciambelle riescono con il buco!
Prima guardando qualche video ero intenzionato a creare un velivolo che partisse dall’acqua con

Ci ho provato anche se non tutte le ciambelle riescono con il buco!
Prima guardando qualche video ero intenzionato a creare un velivolo che partisse dall’acqua con
Questo è un progettino che nasce dall’esigenza di sincronizzare i carburatori e voler contribuire al mondo open-souce maker fornendo una guida ed il relativo software per la realizzazione di un vacuometro digitale a bassissimo costo..
Anche se alla fine tanto basso non può essere!
(Aggiornamenti per il costo nei commenti)
Guardando in rete ho trovato molte guide per sincronizzare i carburatori autocostruendosi il vacuometro, ovvero lo strumento per misurare la depressione. Tale depressione è proporzionale, per l’effetto venturi, all’apertura delle saracinesche di ogni carburatore e pertanto una corretta sincronizzazione consente di avere i cilindri che compongono il motore sullo stesso punto di lavoro e quindi un corretto settaggio generale parte spesso da questa sincronizzazione.
In molti si sono affidati alla classica realizzazione con vasi comunicanti, ma secondo me non si ha una vera percezione della misura in quanto sia per l’effetto dei vasi comunicanti sia per l’effetto dell’aspirazione ogni 2 giri del motore, le colonnine di liquido sono estremamente oscillanti e quando si da gas sono spesso fuori linea e devono esserlo anche quando si avrebbe una perfetta sincronizzazione. Infatti per il principio dei vasi comunicanti se si ha una depressione identica sulle 4 colonnine queste devono mantenere il proprio livello e se esse fossero in una situazione di dissimetria, rimarrebbe tale non fornendo alcuna indicazione sulla taratura.
Per quanto riguarda invece prodotti commerciali secondo me, spesso sono affetti dalle stesse problematiche anche se aiuta avere colonnine di mercurio ovvero uno dei materiali più pesanti in natura. Per i kit a lancette guardando alcuni video ho notato che non si muovono molto rapidamente e questo mi ha fatto pensare ad una risposta ritardata anche troppo del sensore. Alcuni sono anche a bagno di olio proprio per ottenere un filtraggio sulla lancetta. Il costo va dai 40-50 euro per il kit a lancetta agli 80 euro per quello a colonnine di mercurio. A dire il vero molto costoso per uno strumento da usare forse 2-3 volte. Per concludere non so quanto sia possibile misurare la variazione di di 4kPa necessaria alla taratura su degli strumenti che hanno -100kPa come fondo scala.
Per queste ragioni.. Volevo provare a creare uno strumento a bassissimo costo (FAIL) ma spiegherò in ogni caso lo sviluppo per lo meno se a qualcuno viene in mente di provarci sappia che non si può fare…..
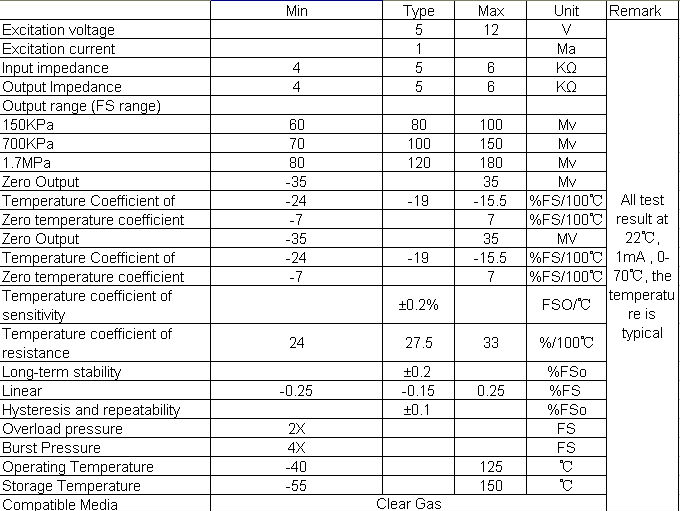
Prima di tutto è stato necessario stilare le specifiche.
I vacuometri commerciali misurano circa -1bar ovvero -100kPa circa. Ma guardando bene sarebbe sufficiente un fondo scala a mezzo bar. Inoltre dal manuale officna hornet pag. 86 ho trovato che per un corretto settaggio si devono avere dei valori di 30mm di Hg(mercurio) oppure 1,2in (pollici) di Hg rispetto al carburatore statico (che non è possibile tarare) che equivalgono ad avere una differenza di pressione di 4000Pa circa. Inoltre ragionando sul numero dei giri al minimo ovvero 1300;1500 rpm ovvero 25 giri al secondo.. ovvero un giro ogni 40ms di cui 20 in aspirazione su 80. Questo per ragionare sulla velocità di aquisizione..
Di sensori che misurano la depressione non ce ne sono moltissimi. Sono molto più frequenti sensori per la misura della pressione.
Mi sono quindi fatto un vero studio sui sensori per la misura di depressione al fine di ottenere il miglior risultato con il minor costo possibile. Ho analizzato anche i barometri per modellismo come il BMP180 della bosch, ma il suo range è di 9000;-500m ovvero 300;1100 hPa (si anche io non avevo mai visto l’ettoPascal) in ogni caso non può andare bene!
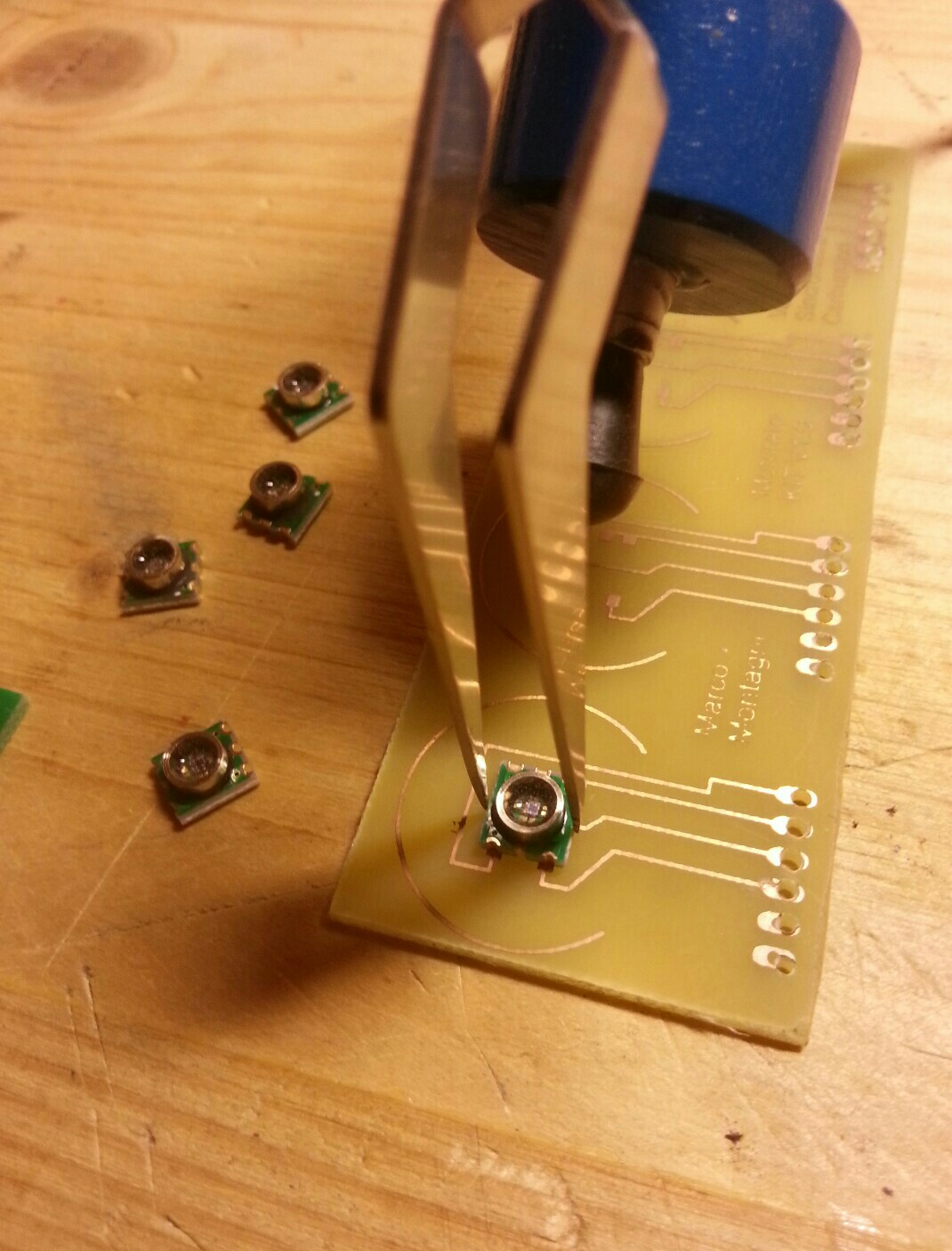
Ad un certo punto ho trovato dei sensori chiamati MD-PS002 cinesi a circa 1-2 dollari l’uno.. Si presentavano discretamente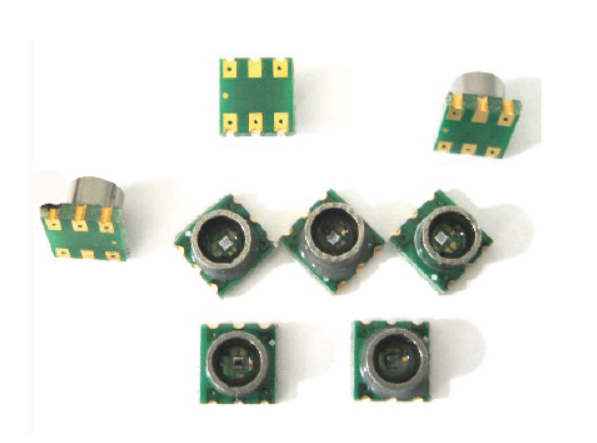
Ed erano simili ad alcuni, ovvero MS5541, che avevamo usato con successo per i sottomarini..
Via… simili è un parolone anche perché questi ultimi costano circa 20 euro l’uno ed integrano un microcontrollore.. .. .. .. .. … ………………
Questi MD-PS002 avevano tutte le carte in regola per questa realizzazione..
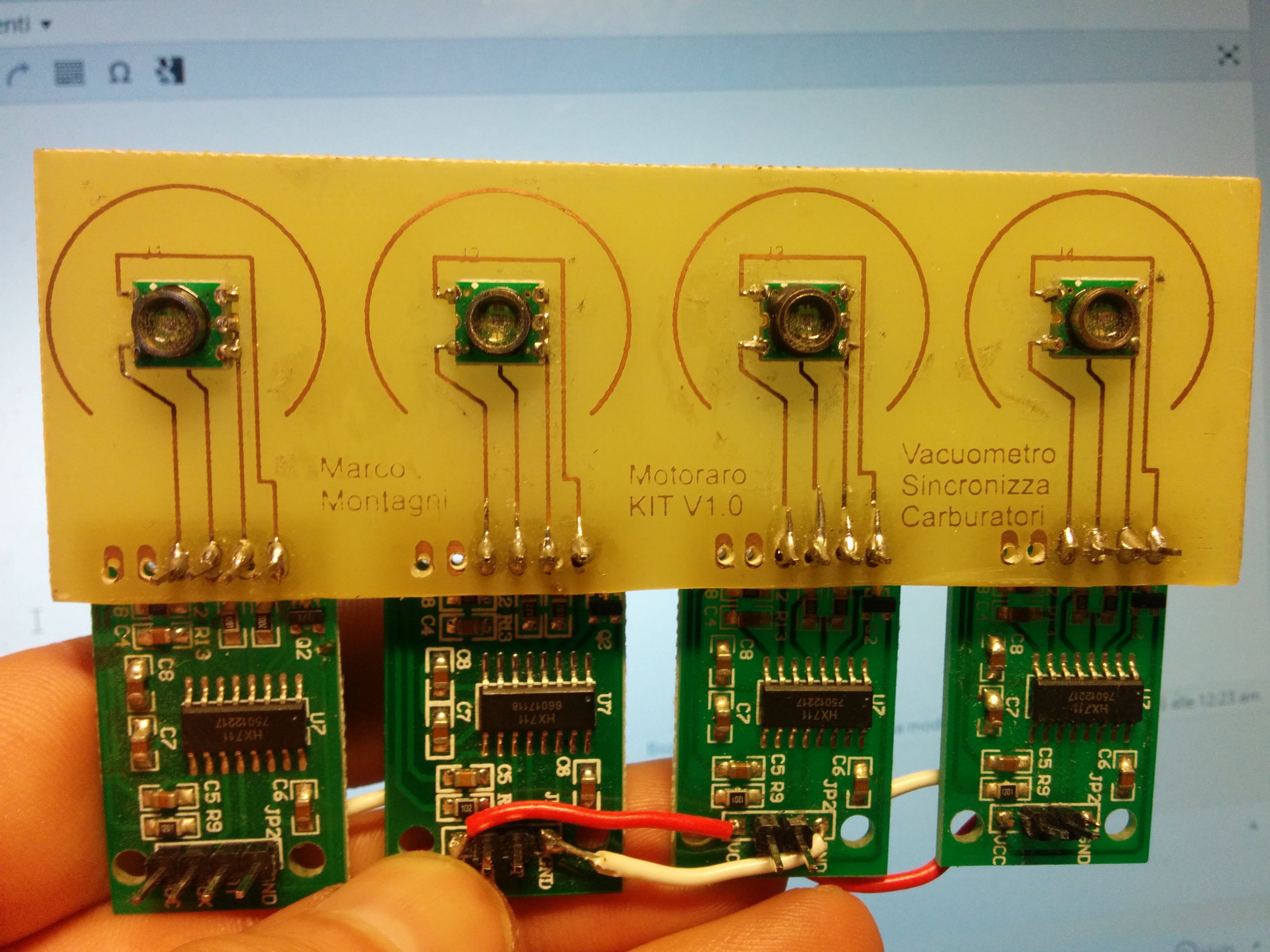
anche se dovevo trovare il modo di far costare poco anche la scheda di acquisizione che da un ponte di wistle non è banale. Ma anche questo ostacolo sono riuscito a sorpassarlo con gli HX711 ovvero un convertitore analogico digitale a 24 bit per ponti di wistle (anche per le celle di carico è perfetto..) proprio quello che volevo progettare.. 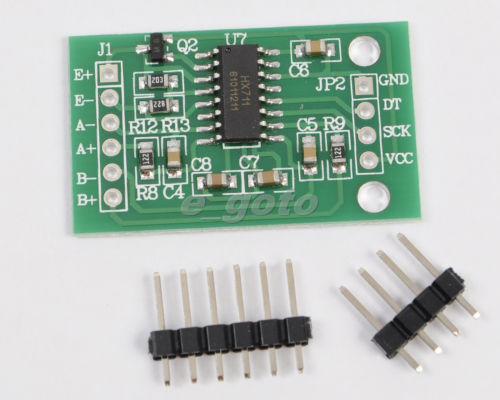
Questo piccolo integrato fornisce un livello prestabilito di tensione al ponte e misura la tensione con una risoluzione di 24bit quindi 2^24 0vvero un valore di più di 16 milioni tranquillamente compatibile con la sensibilità richiesta da casa Honda. E costa pochissimo!! con 10 dollari ne ho presi 10! Inoltre ha una risposta niente male! in meno di 10ms facevo 4 misure e potevo giocare sul numero di letture interne a media.
Tutto contento inizio la progettazione del PCB …
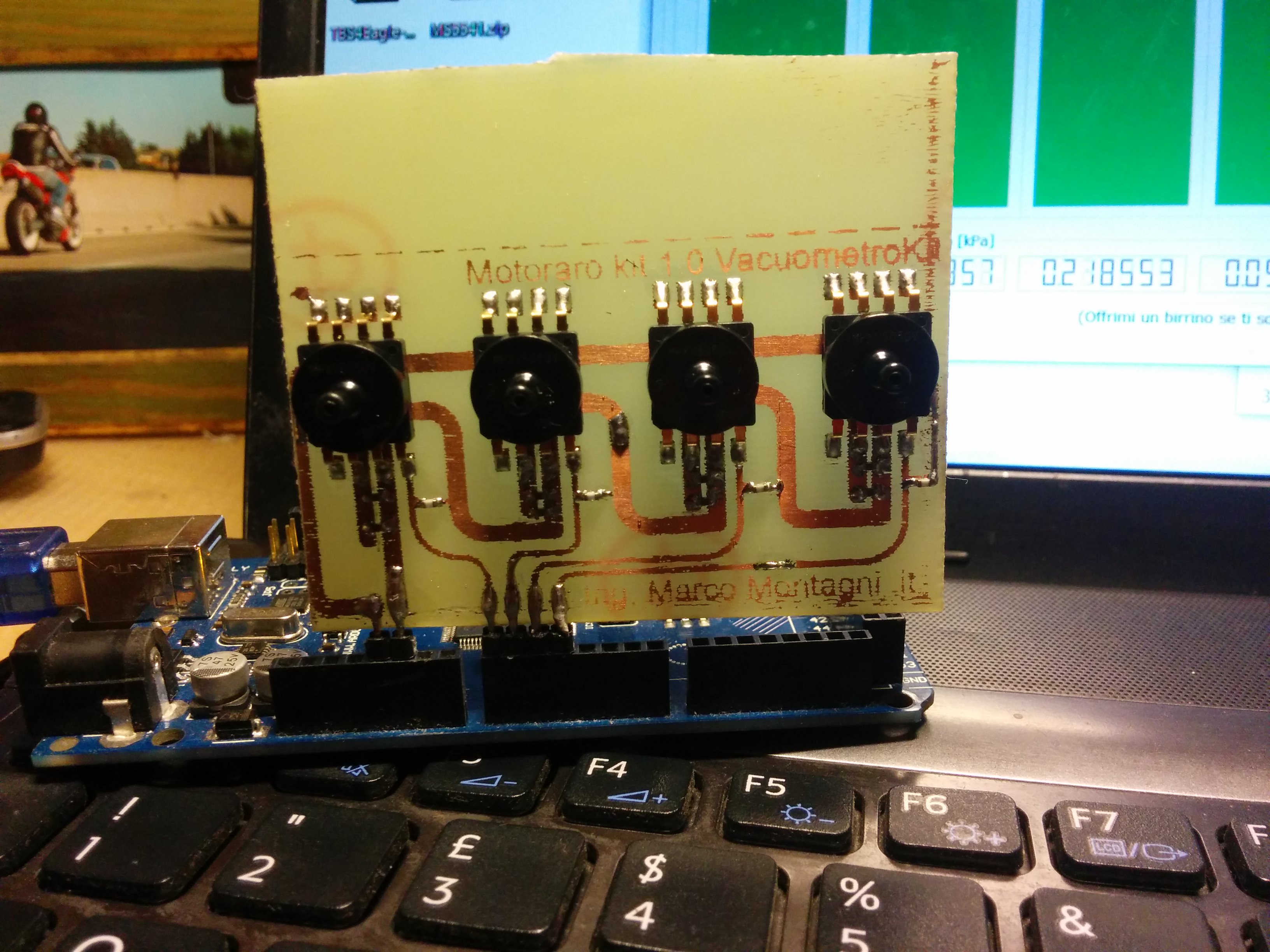
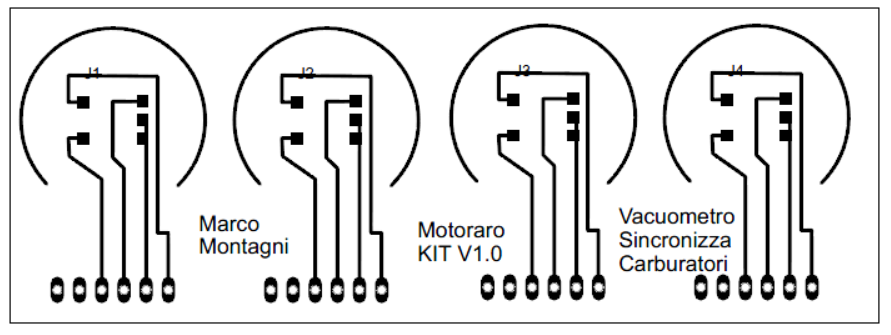 e la realizzaizone….
e la realizzaizone….
Sicuro che con circa 5 euro per i sensori, 5 euro per i convertitori ,e 5 euro per Aduino, chiunque potesse realizzare il suo personale vacuometro digitale!
Poteva essere la svolta per tutti quelli che avevano la necessità di sincronizzare i carburatori!!
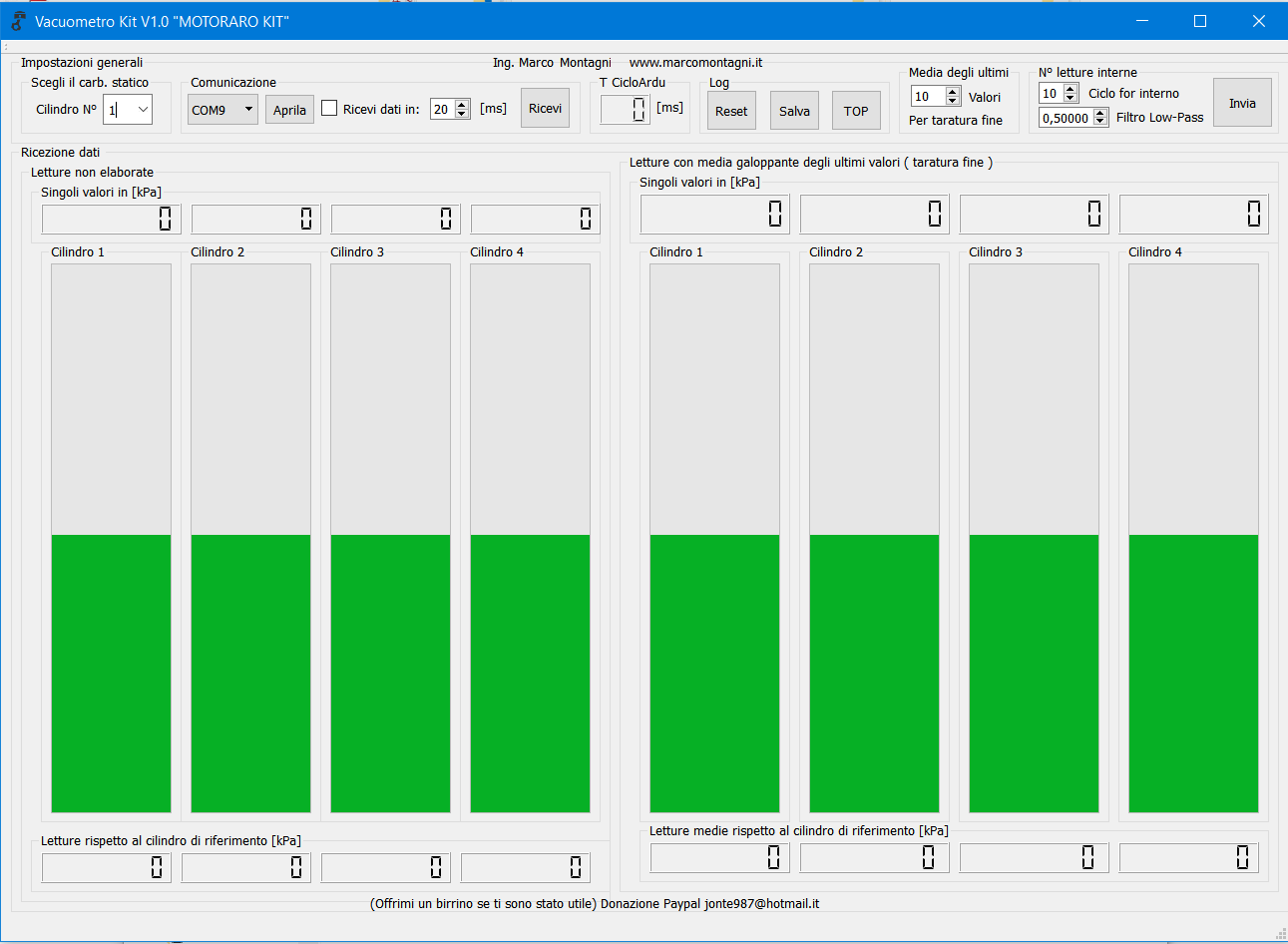
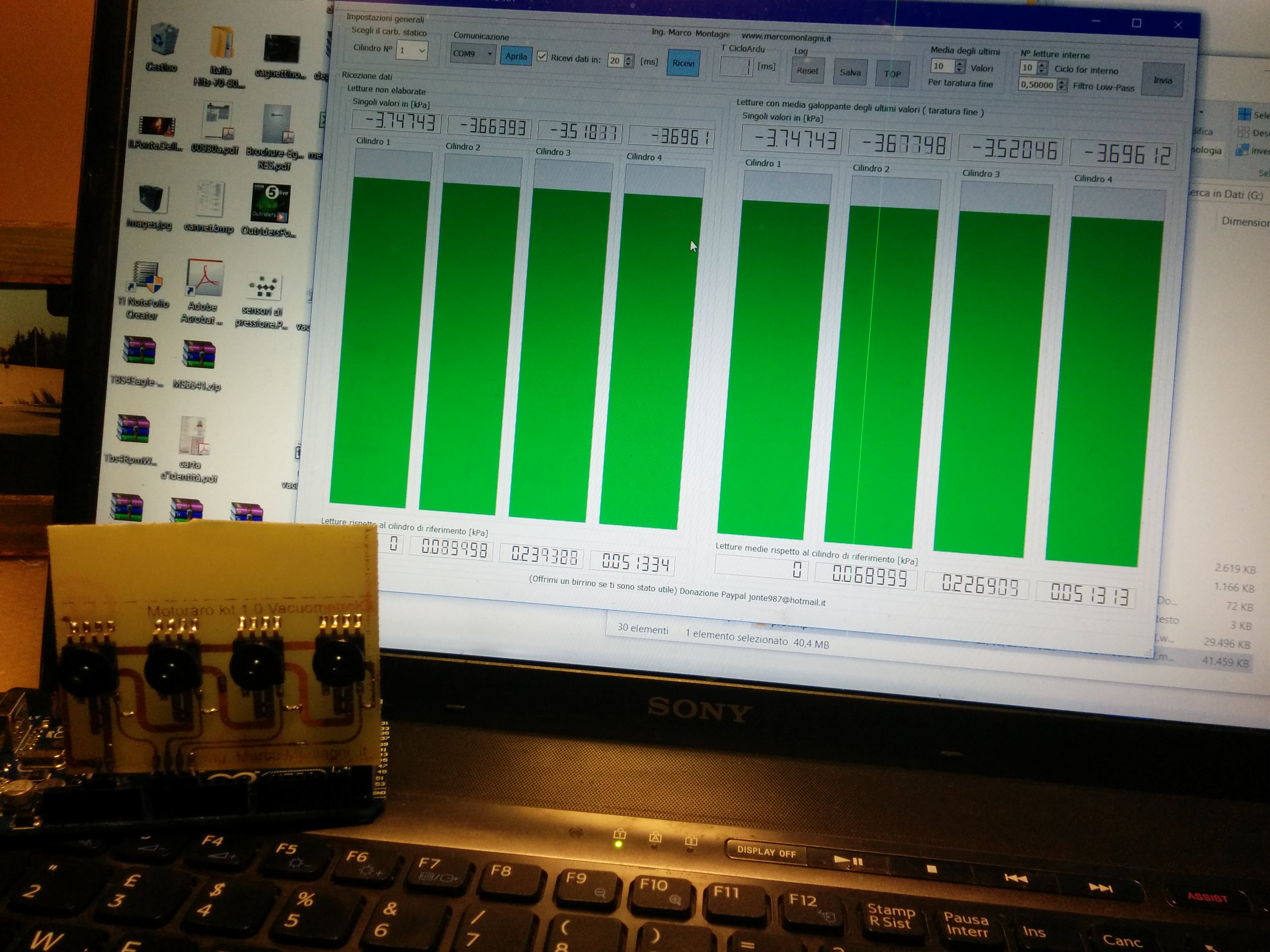
Ho quindi anche realizzato un programma con QT creator per avere un interfaccia di utilizzo semplice che fornisce l’indicazione della depressione dei carburatori ed effettuare la taratura!
Ma udite UDITE!!! i sensori con il ponte di wistle già in partenza fornivano una misura estremamente diversa.. poco male avrei dovuto fare una taratura!! Ma soprattutto come se non bastasse il piccolo ponte interno dopo qualche minuto di utilizzo si scalda variando la propria resistenza interna e quindi la sua misura di pressione.. l’avevo intuita come cosa, ma non avrei mai pensato a dei livelli cosi differenti nel tempo e pensavo che si sarebbero scaldati circa allo stesso modo!!!! Invece erano molto diversi.. addirittura alcuni scaldandosi aumentavano la misura altri la diminuivano! Quindi bo!
Inutile dire che è veramente ardua sincronizzare i carburatori con i sensori cinesi!!!!!!!!!!!!!!!!!!!!!! Ed i vantaggi che dovevano esserci in realtà erano spariti. Con qualche prova sono riuscito in ogni caso a sincronizzare i carburatori, ma è stata una taratura a metà strada tra l’alchimia e la poesia.
Ormai deluso e sicuro che avrei preso qualche infamata da qualcuno che avesse provato a realizzarlo, ho abbandonato il progetto fino a quando non ho deciso di comprare i sensori retroazionati in temperatura da 12 euro l’uno della freescale.. e girovagando in internet ho trovato questo “Arduino Throttle Body Syncronization Shield”, ma anche compilandolo con VisualStudio e modificando il sorgente non sono riuscito a fare funzionare il programma per il pc.. e leggendo i commenti non funziona neanche ad altri!!
Ho quindi deciso di contribuire riprogettando una nuova shield singola faccia in modo data da poterla realizzare in casa!
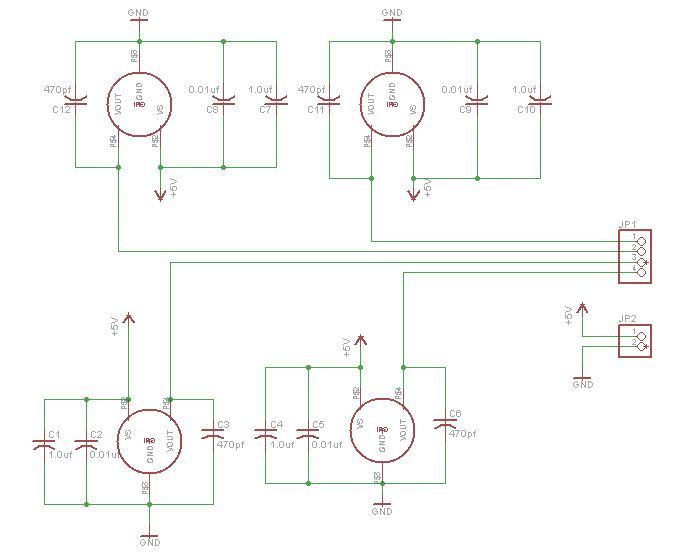
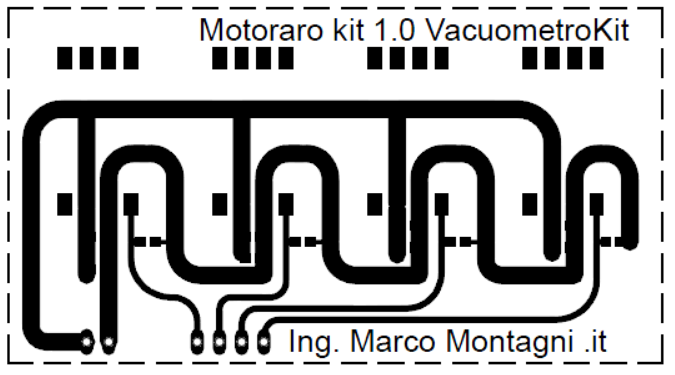
Ed ho creato un nuovo programmino per arduino con la relativa libreria compatibile con questi sensori:
Che hanno un range di funzionamento perfetto al nostro scopo, -50kPa;0, ed escono con un segnale analogico già retroazionato in temperatura da 0 a 5V perfettamente compatibile con il nostro Arduno. Anche se avremo un convertitore a 10bit e quindi 1024 valori che frazioneranno la variabile letta in quanti da 48 Pa circa perfettamente compatibile con la soglia di taratura di 4kPa dettata da casa Honda e con le tempistiche di acquisizione che per un segnale analogico sono nell’ordine dei 50us.
Ovviamente non poteva mancare l’interfaccia che avevo gia fatto per l’altro! Dove ho lasciato alcuni parametri da settare di volta in volta a seconda della tipologia di moto o macchina che si vuole tarare.
Per la realizzazione ..
–Qui potete scaricare il PDF per la realizzazione.
–Qui potete ordinare i sensori necessari MPXV5050VC6T1.
Questi condensatori sono indicati dal costruttore sul data.
-Qui trovate i condensatori per l’uscita da 470pF.
–Qui i condensatori per l’alimentazione da 0,01uF.
–Qui i condensatori per l’alimentazione da 1uF.
Per Arduino
–Qui scaricate il programma Arduino.
–Qui scaricate le librerie di arduino da aggiungere alla cartella libraries in documenti/arduino
Per il PC.
–Qui scaricate il programma per Windows.
Che si aprirà anche senza aver Arduino collegato.. in modo da poter verificare il funzionamento.
Qui scaricate l’exe da sostituire a quello sopra se avete una risoluzione di 1024×600 modificato per Carlo che si sta cimentando nella realizzazione.
Diciamo che per il costo finale non è andata molto bene …
Però l’intenzione c’era!
infatti si spende almeno 50 euro! Però poi possiamo realizzare il nostro vacuometro e sincronizzare perfettamente i carburatori!
Per gli amanti delle QT… per far funzionare la app su un qualsiasi sistema e quindi distribuirla dove non sono installate le qt:
http://stackoverflow.com/questions/16022967/run-exe-without-qt
è necessario prelevare tutte le dll richieste cliccando sull’eseguibile dalla cartella
C:\Qt\Qt5.1.0\5.1.0\mingw48_32\bin
e tutta la cartella platform da qt/mingw/plugins/platforms
e metterla nella directory principale
Creare l’eseguibile in modalità release e metterlo nella cartella con tutte le ddl e con la cartella platforms è proprio come ho fatto io per questo programma.
Enjoy
Concludo chiedendo a chiunque di fare critiche costruttive oppure proporre miglioramenti per il futuro, anche ampliando le funzioni con quello che più ci interessa!! Anche aggiungendo altri sensori per questo KIT.. dal nome bizzarro quanto l’autore.
“Er kit del Motoraro”
PS: Prossimamente aggiungo il video!
Il signor P. mi ha chiesto se ero in grado di aiutarlo.
P. soffre di una malattia che lo costringe a letto immobile.
Un centro ausili ha installato sul letto di P. un computer che può controllare con gli occhi e con il quale può navigare su internet e cambiare canale alla televisione. Purtroppo questo pc all-in-one ha solo una interfaccia ad infrarossi programmabile che gli consente di comunicare con l’esterno. Ovviamente ci sarebbero anche altri modi per comunicare come ad esempio una interfaccia web, ma non era detto che fosse possibile da utilizzare con lo sguardo.

Ho quindi progettato e realizzato una centralina che a seconda di alcuni codici in infrarosso amplia ciò che il signor P. può svolgere quotidianamente.
Quindi o con un telecomando o con un programma pc associato allo sguardo nel caso specifico P. adesso può, oltre a cambiare canale alla televisione, accendere e spengnere la luce, chiamare sua moglie con un campanello radio, ed altre cose in sviluppo in quanto ho inserito una commutazione dei codici da infrarosso a 415MHz in modo da poter ampliare in un secondo momento tutto ciò che P. desidera controllare con altri ricevitori sparsi per la casa. come ad esempio rispondere al citofono ed aprire la porta, oppure cambiare l’inclinazione del letto motorizzato. Una piccola cosa per me, che ho realizzato molto volentieri, e che migliora la vita di una persona.
In questa relazione ho simulato un quadricottero controllato in posizione utilizzando e modificando una interfaccia Matlab esistente. Ho ipotizzato di avere a disposizione dei sensori, GPS, giroscopi, accelerometri e magnetometri triassiali aggiungendo rumore di misura e ristimando lo stato del modello.
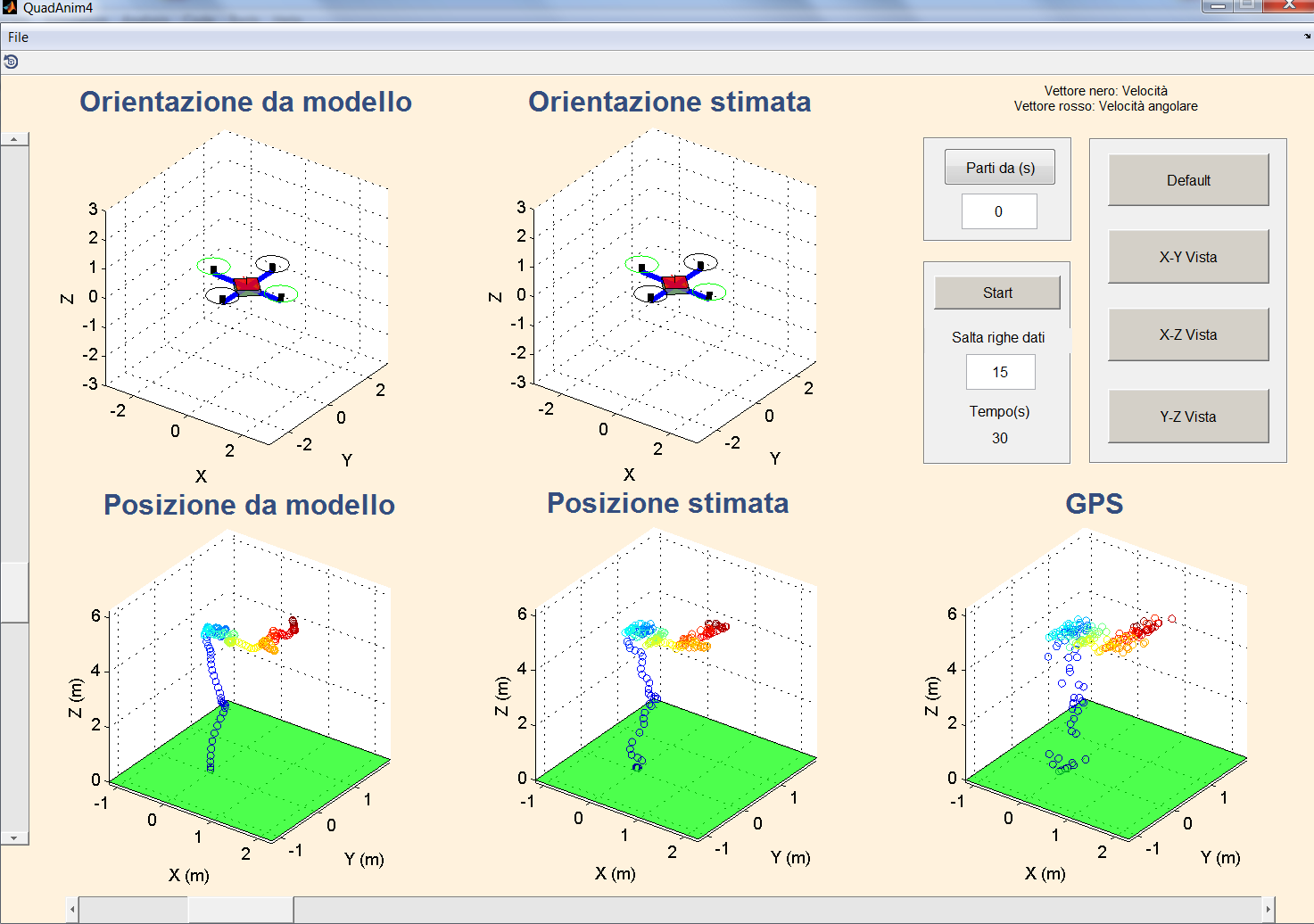
Un interessante lavoro anche in previsione di una realizzazione, già ampliamente elaborato che consente di caricare il proprio modello di quadricottero.
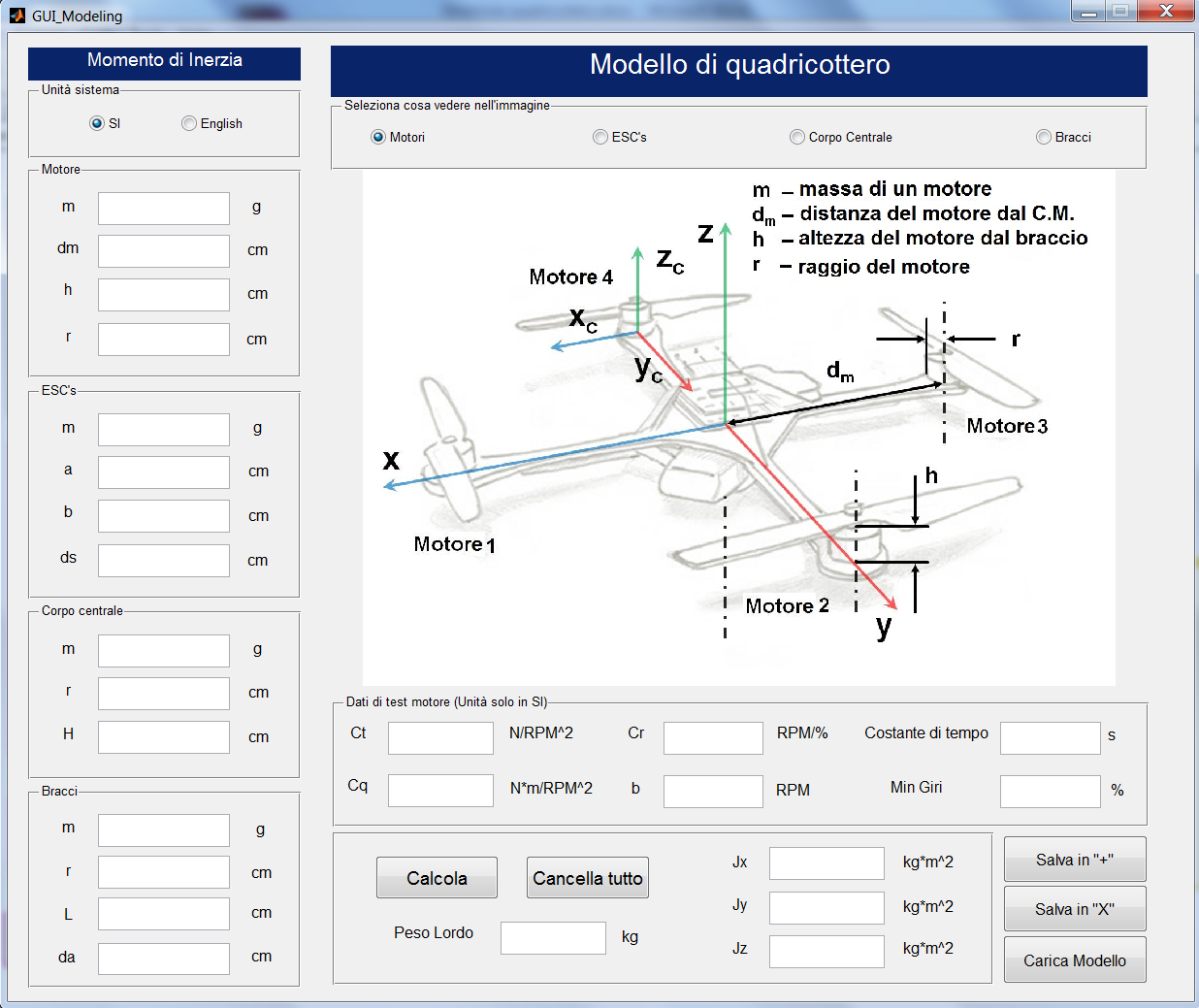
E simulare il comportamento con disturbi e di ricavare i guadagni da inserire nei PID.
Qui potete scaricare todos!
Questo simpatico progetto è nato dall’idea di un design di avere delle stanze a tema. Immaginate di entrare in una stanza con un quadro di una cascata e sentire il suono dell’acqua che scorre come se fosse realmente li. Oppure il canto di uccelli difronte ad un dipinto della foresta..
Per fare ciò ho utilizzato dei moduli lettori Mp3 completamente controllabili da microcontrollore caricabili con microSd. Ad alternanza ciclica sulla sd sono presenti gli audio.
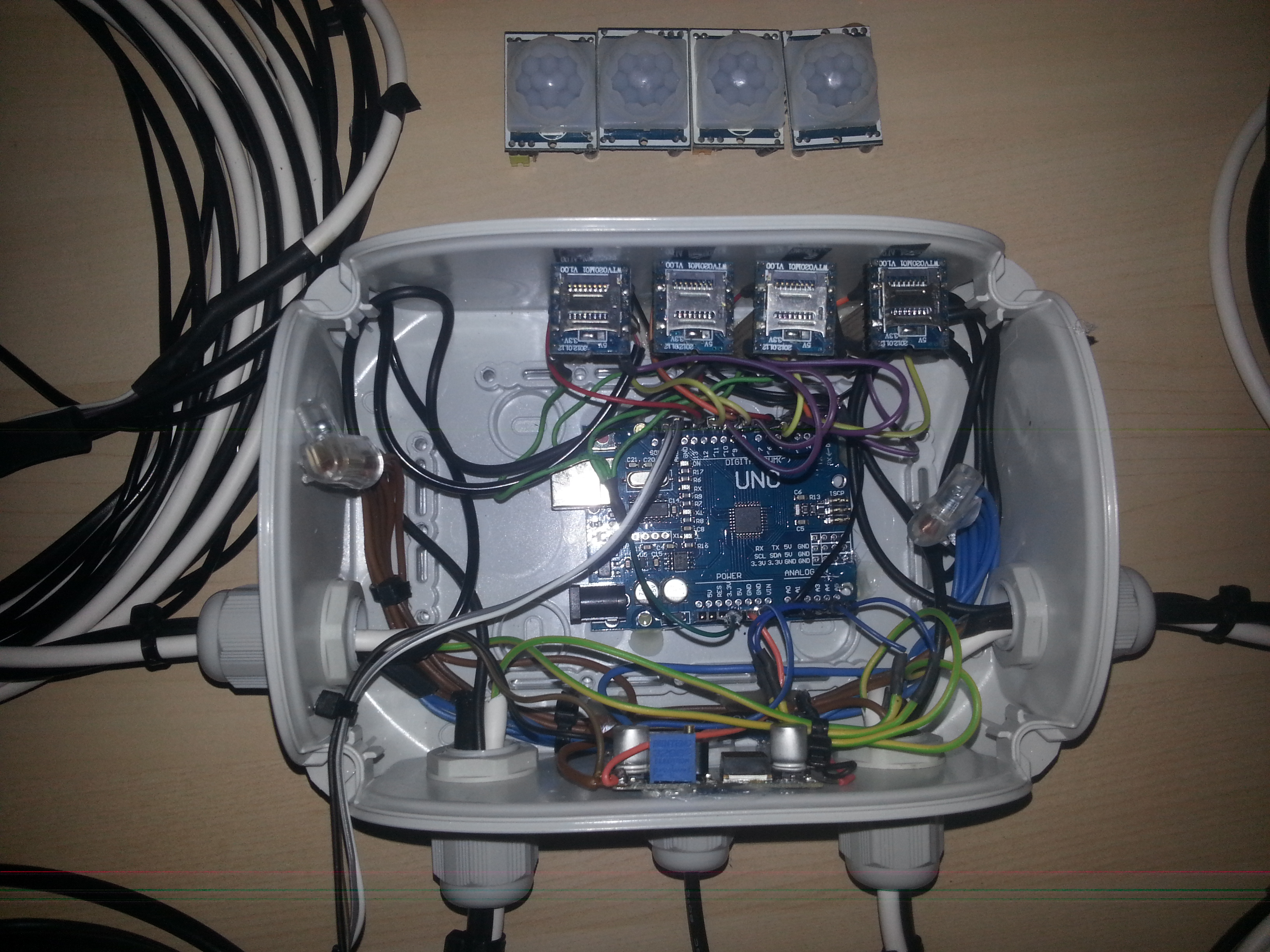
L’attivazione dei suoni ho scelto di farla con dei sensori di movimento. Quattro casse con alimentazione usb sono alimentate da un back a 5V con i rispettivi connettori per quattro ambienti diversi.

La scatolina chiusa con un piccolo display per monitorare lo stato dona eleganza e professionalità.

Può anche essere usata come scaccia cinghiali in campagna con le opportune modifiche, anche considerando una alimentazione alternativa. Come altri progetti i limiti sono solo la propria fantasia.
Ebbi una sventura..
Alle volte capita con i PC pompati..
La scheda video che occupava 2 slot GT8800 andava a tappare il trasporto di calore del sud bridge..
Quindi notai che il pc dopo un po’ che era acceso aveva dei problemi!
I raffreddamenti buoni con ventole constano comunque un 50/60 euro..
Per carità saranno anche ottimi, ma la cifra secondo me non li valeva..
Iniziai a puntare al meglio: WATERCOOLING.
Ma i prezzi erano decisamente fuori dalla mia portata… i troiai costavano 100 euro e i migliori anche 300…
Mi venne una bellissima idea avendo dimestichezza con youtube..
Comprai una pompetta da acquari a 10 euro.. tubi di rame e placchetta per 5-6 euro e provai a costruire i tubi di calore per farci passare il liquido.. cercai per mesi un radiatore da PC ma costavano troppo.. Alla fine ebbi l’illuminazione!!!
Andai in un disfacimento e presi un radiatore di una lancia Y..
feci tutti i raccordi e………………………….. TOP
Sono circa 4 anni che va alla grande!!

Ovviamente l’ho ricolorato.. e ho aggiunto un pannellino per controllare le ventole.. che posso anche spengere..

Un po’ di modding non fa’ mai male! Non emette suono..

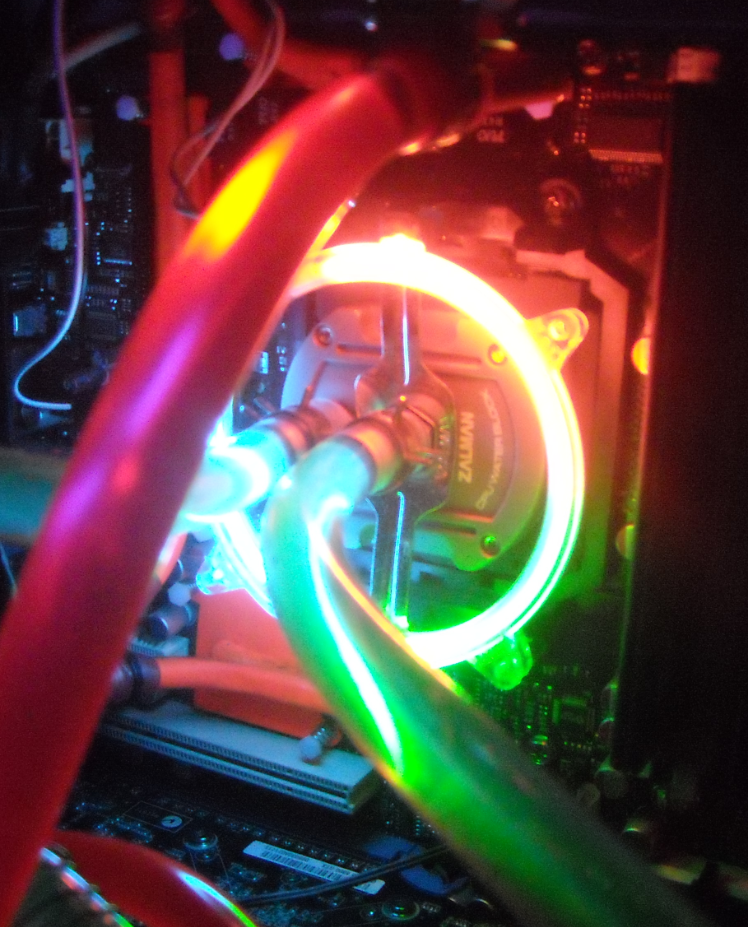 Alla fine decisi di comprare un wateerblock per il processore e la scheda video.. ma li trovai a bassissimo costo con 30 euro li presi entrambi!
Alla fine decisi di comprare un wateerblock per il processore e la scheda video.. ma li trovai a bassissimo costo con 30 euro li presi entrambi!
Ho conosciuto Riccardo circa 2 anni e mezzo fa’ e da circa quella data abbiamo intrapreso un viaggio che ancora oggi non è concluso.
Riccardo è una delle tante persone con una lesione midollo spinale, ma uno dei pochi ai quali è successo da giovane, circa a 20 anni.
Non sapevo molto di traumi di questo tipo e devo dire che ho appreso tantissimo sia grazie a lui, sia grazie ad un seminario che si è svolto a firenze da un gruppo di ricercatori di pisa, oltre che alla mia personale voglia di capire ed aiutarlo.
Quello che ho capito è che il midollo spinale non si rompe o taglia quasi mai del tutto e spesso subisce quello che viene definito schiacciamento dato dalla traslazione tra 2 vertebre della colonna.
Il midollo funziona come una autostrada per i segnali elettrici/chimici che partono dal cervello ed arrivano ad attivare le fibre muscolari, ma funziona anche da retroazione per tutte le sensazioni che il nostro corpo fornisce ed è molto raro che vengano interrotti tutti i segnali infatti si parla di una sorta di percentuale di passaggio elettrico data da alcuni test. Anche la tipologia delle cellule neuronali nella colonna si è adattata allo scopo del passaggio di segnale come una sorta di ponte ed è raffigurata su diversi libri di forma allungata rispetto a quelle della corteccia. I segnali sono nell’ordine dei ms di durata e dal picco picco di potenziale di 90mV (-70mV +20mV), ma spesso anche inferiori e con una componente continua.
Una delle caratteristiche delle cellule neuronali è che sono riconfigurabili, alcune tipologie di modelli di reti neurali artificiali sono ispirate a quelle naturali e si modellano con legami pesati di attivazione e devono essere addestrate per trovare proprio i legami che attivano il neurone successivo. Infatti è possibile che avendo avuto un trauma in una determinata area celebrale un’altra area si sostituisca a quella danneggiata facendo percorrere al cervello una strada differente da quella che andrebbe verso il trauma e quindi la zona danneggiata. Anche per questo sono riconfigurabili. Una curiosità che ho scoperto al seminario è che proprio questa riconfigurabilità è molto più potente di quello che si potrebbe pensare: alla università di Pisa è in sperimentazione un braccio robotico collegato a dei sensori radio ad una persona che ha perso il braccio che rilevano i segnali elettrici ed attivano gli attuatori sul braccio robotico. Il difetto è che nello stringere un bicchiere di plastica non c’è la consueta retroazione del segnale di tatto sullo stesso nervo e per questo anche allenandosi rimane difficoltoso stringerlo senza romperlo. Quello che hanno provato è stato inserire una retroazione con dei sensori sui polpastrelli del braccio robotico e spararla in modo abbastanza grezzo sul nervo senza una interpretazione ben precisa. Morale della favola la persona che ha sperimentato questa tecnica, dopo un periodo di addestramento è riuscita ad azzeccare il 100% di materiali passando il polpastrello robotico con il sensore sopra alle superfici. Tale test ha sperimentato una grande attitudine del cervello all’interpretazione dei segnali, che sicuramente non danno la stessa sensazione di un polpastrello vero, ma che dopo un periodo di addestramento riesce ad associare quei segnali ad un certo tipo di rugosità dei materiali. Un’altro test scientifico effettuato che rivela l’adattabilità delle reti neurali è quello della scimmia presente su www.ted.com alla quale hanno collegato dei sensori direttamente nel cervello corrispondenti al movimento della mano che la faceva giocare ad un banale gioco con un joistik e quando vinceva il gioco la scimmia poteva bere del succo tropicale tramite una cannuccia. Collegando direttamente i sensori al gioco senza joystic la scimmia ha iniziato a giocare senza muovere la mano, ed a vincere il succo lo stesso.
Mi pare plausibile che attualmente, sia la parte riferita alla microelettronica dei componenti (siamo a 14nm) rispetto alla grandezza dei neuroni e sia la velocità del campionamento (DAC e ADC) sia ampliamente compatibile con quella che potrebbe essere una interfaccia midollo spinale proprio sulla lesione, (essendo in grado sia di rilevare i segnali sia di immetterli) quello che non so attualmente è se i materiali dei sensori a lungo andare subiscono un processo di graduale deterioramento/ossidazione tale da rendere ancora impossibile la progettazione di tale interfaccia, ma posso dire che l’università di pisa sta provando proprio questa strada e sarebbe l’applicazione più bella che si potrebbe fare della tecnologia. La riconfigurabilità entrerebbe in gioco per l’effetto della non perfetta ed identica alla precedente giunzione della lesione tra la giunzione superiore ed inferiore (la giunzione superiore deve campionare ed interpretare i segnali e rispararli sulla giunzione inferiore, la giunzione inferiore dovrebbe campionare i segnali provenienti dalla periferia del corpo e rispararli sulla giunzione superiore in modo da ottenere anche una retroazione).
Anche se alcune tecniche di prototipazione come la stampa 3D sono ampliamente disponibili ogni lesione, e quindi ogni interfaccia, vorrebbe la sua progettazione singolare ed unica in riferimento alla dimensione e livello della lesione, anche per questo ci vorrà ancora molto tempo prima di una realizzazione effettiva.
A parte la riconfigurabilità delle rete neurali spesso i traumi spinali sono tali da impedire qualsiasi movimento o sensazione, ma secondo me anche i medici spesso per la consueta loro formazione scientifica tendono a dire le cose come vuole l’attuale medicina scoraggiando i pazienti anche nel provare e sperimentare alcune tecniche proprio per allenare i neuroni a farli percorrere strade alternative al trauma. Anche perché sarebbe necessaria una strategia diversa per ogni paziente. (Dico questo perché Riccardo ne è l’esempio)
Infatti e purtroppo sono spesso molto singolari i casi di traumi midollo spinali da renderli quasi esclusivi e proprio per questo la realizzazione di tutori ed aiuti in genere non trova applicazioni adatte al mercato ed alla produzione della tipologia di tutori di aiuto a piccole nicchie di persone, ma pur sempre persone.
Il percorso che sta facendo Riccardo si basa sull’adattabilità in concetto generale dei neuroni anche se la sua lesione è tale da non poter muovere o sentire entrambe le gambe. La cosa che mi ha detto ad uno dei primi incontri dove io gli proponevo motori ed escoscleletri reputando impossibile che potesse migliorare ancora è : “Se faccio per un po’ di volte una cosa, mi è spesso successo di poterla rifare”. Quello che potrebbe essere un movimento dato dalla contrazione di un muscolo che per noi è banalmente attivabile per lui è molto più complesso, ma lentamente riesce a migliorare, e migliora di giorno in giorno e con lui ho capito che non importa cascare o quante volte si casca, ma come ed in quanto tempo si riesce a ritirarsi su.
Tra le tante ore passate insieme abbiamo condiviso un bel po’ di emozioni, dai primi test e prototipi fino a vederlo sprizzare di gioia e contentezza perché eravamo arrivati ad una probabile soluzione.
Per il momento, il suo percorso per camminare, (si anche io non ci credevo) utilizza 2 tutori, uno sulla caviglia che gli mantiene a 90° piede e stinco ed uno che è una sorta di bastone a quattro piedi (da riprogettare per salire le scale ed in progress) snodabile per aiutarlo ad alzarsi in piedi ed a posizionarsi sulla singolarità di struttura che si ottiene con un angolo tra coscia e polpaccio, ovvero al ginocchio, > di 180°. Questa posizione è stabile e riesce a mantenerla senza sforzi reggendosi al bastone a 4 piedi solo per mantenere l’equilibrio. A questo punto con una rotazione del busto porta avanti una gamba, poi il bastone a quattro piedi e poi l’altra gamba e ricomincia.
Ovviamente ci sono dei problemi che in primis abbiamo analizzato e che tramite molteplici prove stiamo cercando di risolvere. Infatti se nel portare avanti un piede trova una certa pendenza oppure un particolare ostacolo come ad esempio un ciuffo d’erba alle volte accade che il ginocchio vada ad un angolo inferiore ai 180° perdendo la singolarità di struttura e quindi la stabilità. Oltre alla caduta il risultato è un più lento apprendimento per paura di inciampare ed in ogni caso è possibile sperimentare solo su superfici particolarmente lisce.
Era necessario un nuovo tutore che stendesse ed attenuasse il comportamento del ginocchio in quelle situazioni.
Il nostro viaggio è arrivato adesso ad una svolta, dopo aver cercato di replicare in modo propocettivo (con dei motori sarebbe facile, ma non si avrebbe un apprendimento) il comportamento del quadricipite con elastici, camere d’aria tra piede e cintura ed anche con una sorta di bretelle e fasce elastiche, ed anche tramite l’ausilio di fluidi non newtoniani che si è protratto per circa 2 anni, siamo arrivati a delle specifiche molto promettenti e ad un primo prototipo funzionante.
Questo oggetto è il frutto di circa 2 anni di sperimentazione e non vedo l’ora di mandare i preventivi per realizzarlo:
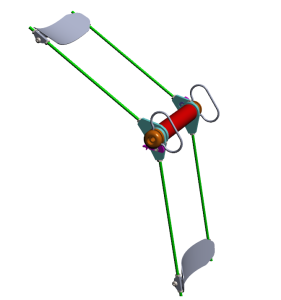
Ho visto su FB i commenti di altri ragazzi che adottano la stessa tecnica per camminare e quando si alzano e fanno i primi passi per la prima volta, descrivono quel momento come io non ho mai descritto niente della mia vita.
Avute le specifiche, Quello che per un ingegnere meccanico è veramente semplice da progettare o realizzare riesce a far camminare una persona ed anche se rimarrà per un utilizzo di nicchia credo che valga, almeno una volta nella vita, cimentarsi rispetto a qualsiasi altro progetto economicamente redditizio per il semplice fatto che è giusto farlo e che tutte le persone nel loro piccolo dovrebbero provare a migliorare altre vite.
Riccardo mi ha spesso detto che per me non era niente, ma per lui era tutto.
Arduino si sta dimostrando uno degli sviluppi dell’elettronica e dei microcontrollori più interessanti di sempre.
Infatti con Arduino è possibile creare, per ogni esigenza ,un tipo di controllo o allarme che il cliente richiede in modo semplice, dinamico e adattabile nel tempo.
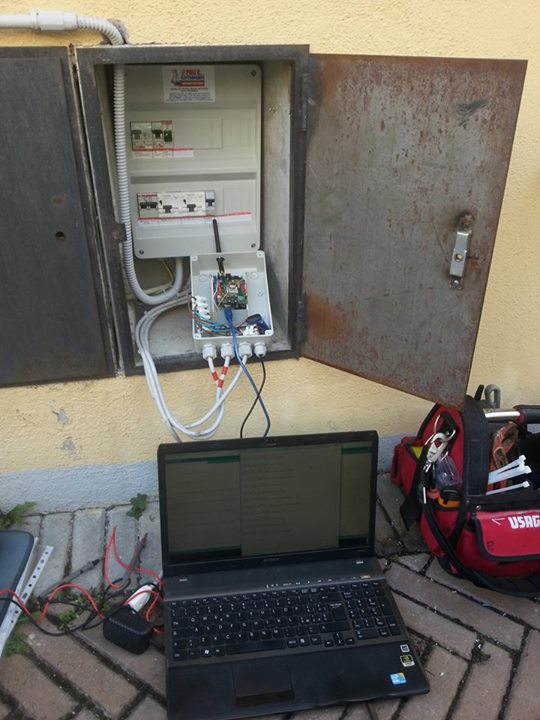 La collaborazione con la ditta Poli C. ha dato come primi frutti un allarme Allagamento con attivazione di sirena ed SMS inviabile a quanti numeri si desidera. Nel testo del messaggio è possibile anche inserire una lettura di un sensore che potrebbe anche attivare l’allarme su tale lettura superiore ad una certa soglia stabilita come nel caso sottostante dove ho adottato una lettura di corrente con un interessante sensore ad effetto Hall per la lettura della corrente sulle pompe.
La collaborazione con la ditta Poli C. ha dato come primi frutti un allarme Allagamento con attivazione di sirena ed SMS inviabile a quanti numeri si desidera. Nel testo del messaggio è possibile anche inserire una lettura di un sensore che potrebbe anche attivare l’allarme su tale lettura superiore ad una certa soglia stabilita come nel caso sottostante dove ho adottato una lettura di corrente con un interessante sensore ad effetto Hall per la lettura della corrente sulle pompe.
 Potrebbe essere ampliata la funzionalità con chiamata di allarme sia tramite microfono in loco sia con registrazione tramite una shield aggiuntiva di codifica MP3.
Potrebbe essere ampliata la funzionalità con chiamata di allarme sia tramite microfono in loco sia con registrazione tramite una shield aggiuntiva di codifica MP3.
La quantità e tipologia dei sensori che potrebbero essere impiegati è praticamente la stessa che caratterizza i sensori di sistemi PLC industriali avanzati come la Siemens, Bticino ecc ma con un costo decisamente inferiore. Infatti è possibile effettuare una ricerca su ebay con la dicitura “Arduino sensor” e vi rendete conto sia dei prezzi sia della quantità e tipologia disponibile.
Sensori ad infrarossi, di colore, di livello acqua, di corrente, di movimento, GPS e piattaforme inerziali, accelerometri gyro e magnetometri, abbinati ad una vastissima gamma di azionamenti come i servi, relè e relè a stato solido, oppure i ponti h per i motori in continua ed anche per tutta la parte di comunicazione disponibile come i moduli LCD, xbee, wifi, bluetooth, ethernet, GSM sia sms chiamate o internet, tutto compatibile con il cuore Arduino che a seconda delle necessità potrà essere anche sostituito nel tempo ampliando le possibilità esalteranno nel tempo la crescita di questo piccolo grande oggetto.
Per queste premesse ho deciso di ampliare la mia attività fornendo consulenze gratuite per la realizzazione di sistemi di questo tipo, se invece desiderate imparare ad utilizzare Arduino, avendo già esperienza sia nel campo delle ripetizioni che nell’insegnamento, posso darvi tutti i concetti generali proprio come ripetizioni.
Oppure se avete un problema che non riuscite a risolvere sul vostro Arduino posso cimentarmi con voi anche se avete combinato qualche “arrosto” e con l’ausilio del bromografo, della terza mano gravitazionale e della stazione ad aria calda, posso aiutarvi nella vostra realizzazione. In questo ultimo caso vi anticipo che generalmente non si riesce a levarne le gambe prima di un pomeriggio o di una mattinata e quindi una consulenza tipica non scende al di sotto dei 50€ pagabili con vaucer lavorativi.
CENTRALINA V 2.0

Integrati 4 contatti da monitorare più uno per la verifica dell’alimentazione di rete (batteria tampone da 9V e passaggio a batteria automatico). Vari numeri allarmabili a rotazione con SMS e chiamate. Ricezione di SMS ed attivazione di qualsiasi funzione tipo monitoraggio sensori o relè e disattivazione allarme.
Display con verifica:
Di allarme;
Di Info:

E dello stato:

Una confezione carina …


Una delle tecniche che viene utilizzata dalla case di produzione di cellulari per assicurarsi la vendita dei nuovi dispositivi è sicuramente l’ingente costo dei ricambi.
Infatti, quando ad un dispositivo si rompe il vetro, è spesso necessaria la sostituzione sia del vetro che dell’LCD ovvero i cristalli liquidi anche se perfettamente funzionanti.
Non solo spesso, nella maggioranza dei dispositivi è necessaria la sostituzione completa della struttura che sostiene LCD e vetro.
Spesso in assistenza per la sostituzione del vetro danneggiato si rischia di spendere anche 150-180€ e sempre più persone si tengono lo schermo con il vetro rotto.
Una tecnica per risparmiare ed riutilizzare gli LCD originali è quella che ho sperimentato con successo fino ad ora.
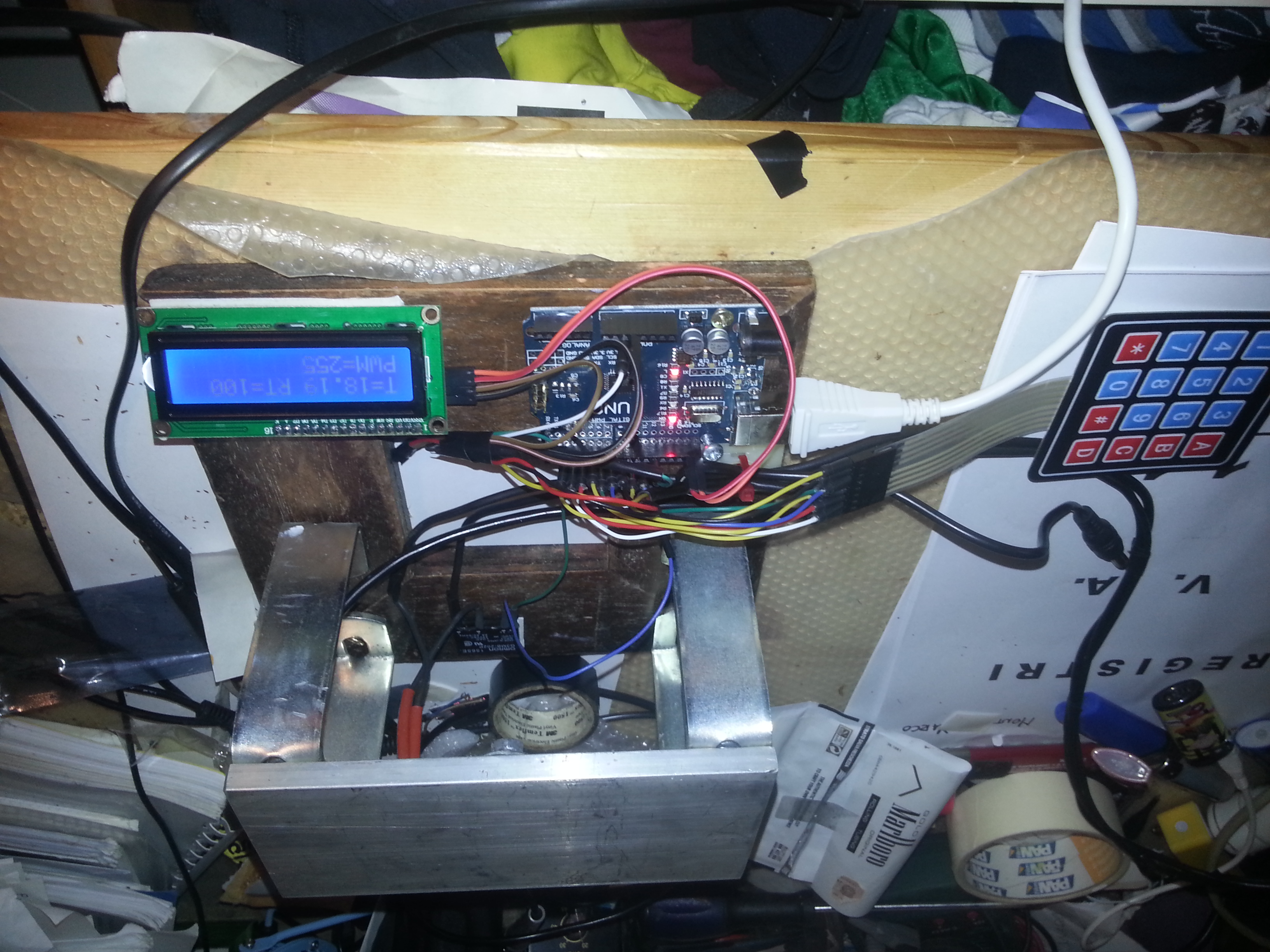 Consiste nel posizionare l’lcd su una piattaforma scaldante retro azionata ad una temperatura precisissima che eviti il danneggiamento dei componenti elettronici, ma contemporaneamente risulti efficace per ammorbidire la colla reagente UV posta tra vetro ed LCD dalla case di produzione.
Consiste nel posizionare l’lcd su una piattaforma scaldante retro azionata ad una temperatura precisissima che eviti il danneggiamento dei componenti elettronici, ma contemporaneamente risulti efficace per ammorbidire la colla reagente UV posta tra vetro ed LCD dalla case di produzione.
Tale colla fa sembrare LCD e Vetro un tutt’uno ed elimina gli effetti di riflessione che sussisterebbero tra le due lisce superfici ed è quindi una particolarità di qualità rispetto a modelli precedenti.
Successivamente ad aver posizionato l’LCD con l’ausilio di una ventosa è necessario far scorrere un filo al molibdeno di 0.1mm di diametro fino alla saldatura con il vetro. 
Lentamente facendo scorrere il filo è possibile separare l’LCD dal vetro.
Successivamente a questo è possibile rimuovere la colla rimasta sull’LCD con un solvente apposito.
Avendo già comprato il vetro di sostituzione disponibile su ebay di quasi tutti i modelli a meno di 10€ è possibile rimettere la colla UV ed il vetro e risaldarla con il bromografo.
 Un’altra tecnica che usano la case produttrici di cellulari è quella di non aggiornare il Software e quindi dopo pochi anni ritrovarsi con un terminale estremamente lento. Per questo è possibile sostituire il software con uno aggiornato e far risuscitare vecchi cellulari che avevate dato per spacciati. In media si riesce ad avvelocizzare un dispositivo del 50-100% rispetto al software fornito dalla casa madre e soprattutto eliminare tutte le app che non userete mai nella vita che occupano solo memoria. Una delle versioni più gettonate è la cyanogenmod, trovate molti dettagli sul web.
Un’altra tecnica che usano la case produttrici di cellulari è quella di non aggiornare il Software e quindi dopo pochi anni ritrovarsi con un terminale estremamente lento. Per questo è possibile sostituire il software con uno aggiornato e far risuscitare vecchi cellulari che avevate dato per spacciati. In media si riesce ad avvelocizzare un dispositivo del 50-100% rispetto al software fornito dalla casa madre e soprattutto eliminare tutte le app che non userete mai nella vita che occupano solo memoria. Una delle versioni più gettonate è la cyanogenmod, trovate molti dettagli sul web.
Anche se non tutte le ciambelle riescono con il buco.. Ci ho provato..
Il primo modello che ho realizzato da Mamma Licia durante le mie vacanze estive (dopo un po’ al mare… non so che fare) è questo..
Si inabissava!!
https://www.youtube.com/watch?v=XCyST86c_FU Preso spunto da quei modelli che partono dall’acqua visti su youtube.. e con l’ausilio di due guide… GRAZIE GIACOMO CONSOLATI per la pazienza!
Dalla quale ho preso spunto per il profilo alare e tutti i calcoli per la velocità minima di volo! Per i meno esperti… Aveva un solo problemino… la barra centrale dove era alloggiato il motore creava un momento sul baricentro.. fatto sostanzialmente dalle batterie, che tendeva a ribaltare l’aereo…Ho provato quindi a posizionare le batterie sulla barra ma le vibrazioni hanno causato uno scollamento della barra e la rottura di tutto!!!
Allora ho optato per un modello classico.. Avevo anche l’aiutante! GRAZIE FILIPPO!! 
Il risultato però è che con i due galleggianti l’aereo si impuntava e quindi ha preso fuoco l’esc… che poi ho sostituito!
Allora ho optato per una partenza non proprio democratica e senza controllo perché l’esc con il bec aveva fatto andare in tilt i servi..
https://www.youtube.com/watch?v=5nCdlINwDWU Alla fine ho ricomprato i servi e ho riprovato… https://www.youtube.com/watch?v=5Idb4zMh-J4
Il problema maggiore è che si è rotto un flap ed è andato su un tetto schiantandosi amaramente .. per fortuna senza fare danni!!
Ma diciamo che volava alla grande…… Anche se rimane MONOUSO!!! Un sogno prossimo è questo!! https://www.youtube.com/watch?v=OqLoG7C6DYw